背景
面临问题
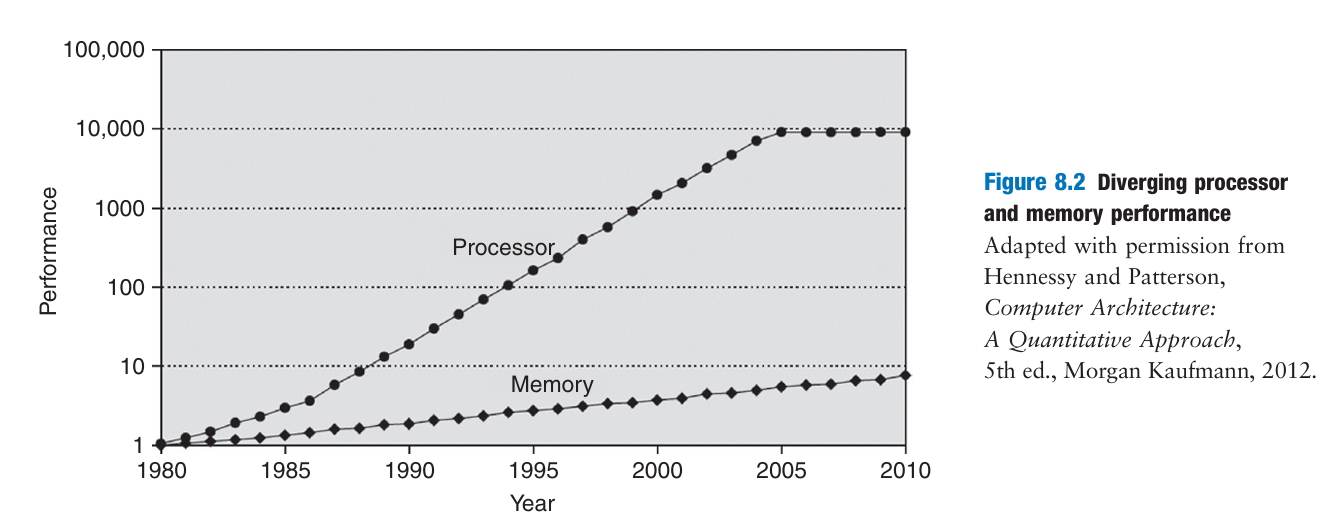
- 单级存储系统中,主存的存储速度与 CPU 的速度不匹配,造成 CPU 资源的浪费
- 程序运行时访问主存存在明显的局部性特征
局部性原理
无论是存取指令或存取数据,所访问的存储单元都趋于聚集在一个较小的连续存储区域中。
时间上,刚被访问过的存储单元可能不久又将被访问;空间上,刚被访问过的存储单元的临近单位可能不久被访问。
原理
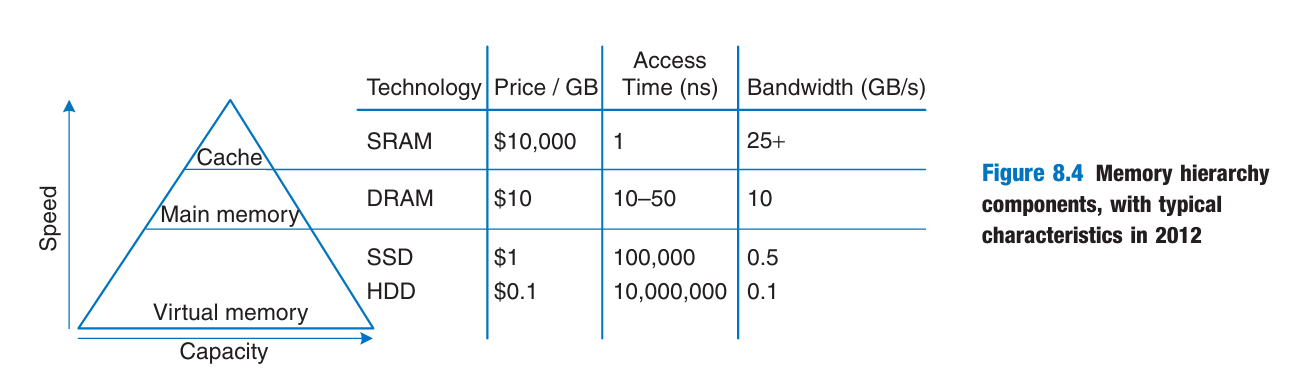
存储器系统通过使用存储器层次结构,将快速、小容量的廉价存储器和慢速、大容量的廉价存储器组合起来,接近理想的快速、大容量存储器。以便快速访问最常用数据,同时又有容量存储其他大量数据。
层次结构
- Cache,通常放在与处理器同一芯片的 SRAM 中。
- Main Memory(主存),也叫物理存储器,包含了虚拟存储器的一部分,可以看作硬盘中常用数据的高速缓存。
- Hard Drive(硬盘),存储不在主存的数据,提供了比主存实际容量更大的存储器空间,通过虚拟内存机制扩展可用内存,称为虚拟存储器。

性能分析
- 缺失率与命中率
- 平均存储器访问时间:处理器必须等待存储器的每条装入和存储指令平均时间
Cache
Cache,高速缓冲存储器。
在CPU和主存间设置一容量较小的高速缓存,其中总是存放最活跃(被频繁访问)的程序块和数据,大多数情况下,CPU能直接从这个高速缓存中取得指令和数据,而不必访问主存。
这就是Cache。
解决的问题
- Cache 里要存放哪些数据?
- 如何判断数据是否在 Cache 中,以及如何在 Cache 里寻找数据?
- Cache 满后,如何用新数据替换旧数据?
基本概念
- 容量(Capacity,C)
- 数据块(Block)
- 块大小(b):一个高速缓存块中的字数,也表明主存与Cache之间局部总线的宽度。为了利用空间局部性,一般一个块都大于 1 个字。
- 块数(B):
- 标记(Tag):每一 Cache 数据块有一个标记字段,用来保存该 Cache 数据块对应的主存数据块的地址信息,用以唯一区分用于区分映射到同一 Cache 行的不同主存块。
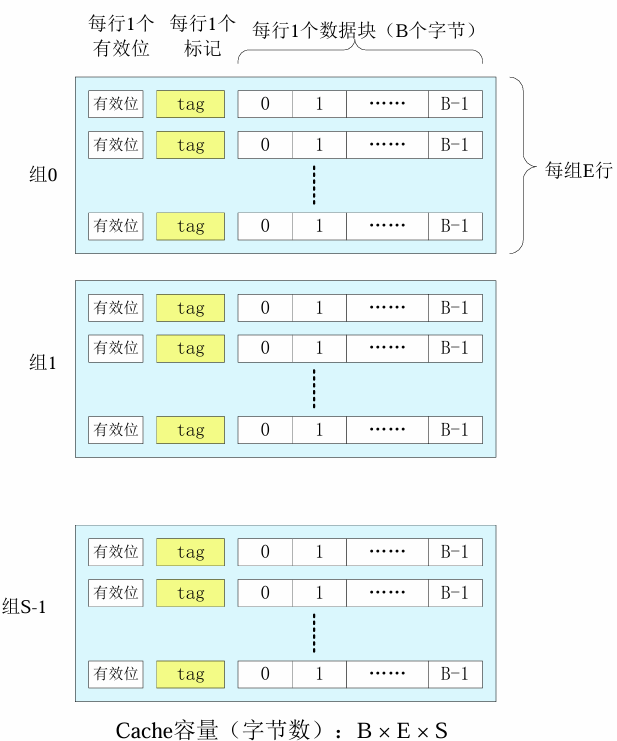
- 有效位(Valid Bit):Cache 中每一 Block 有一个有效位,用于指示相应数据块中是否包含有效数据。
- 行(Line):Cache 中一个 Block 及其 Tag、Valid Bit 构成 1 行。
- 组(Set):一个高速缓存可被组织为 S 组,每一组有一个或多个数据块。
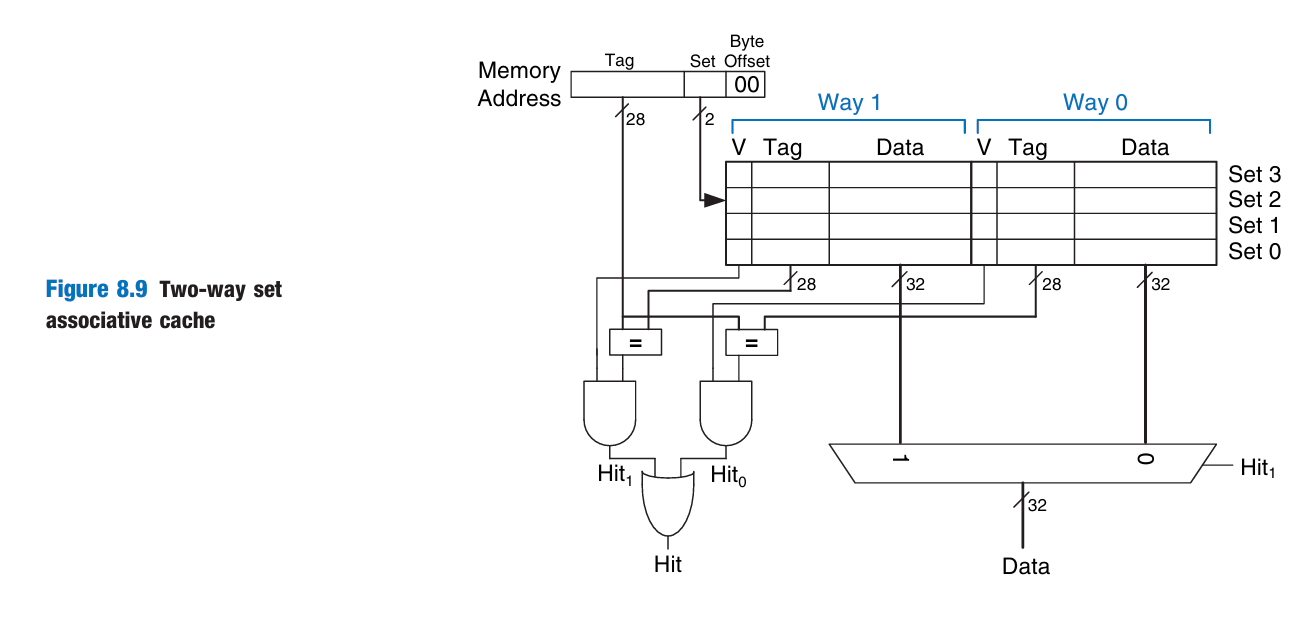
- 路(Way)、相联度(Degree of Associative):Cache 相关联的等级,每一路具有独立的地址比较机构,各路地址比较能同时进行(一般与组结合),路数即指一组内的块数。
因此 Cache 为一个二维阵列,行为组,列为路;每一个项包括一个块、一个 Tag 和一个有效位(合称为一行,注意与前面的行区分)。
基本结构
- 存储机构:一般采用 SRAM 构成。以数据块 Block (若干字)为单位,Cache 块大小与主存块大小相同。
- 地址机构:地址比较、转换机制,地址标记(Tag),一个 Block 具有一个 Tag。
- 替换机构:记录 Block 的使用情况,替换策略,有效位(v)记录对应数据块中的数据是否有效。
映射
主存中数据的地址和 Cache 中数据的位置之间的关系称为映射。
- 把主存划分成大小相等的主存块(Block)
- Cache 中存放一个主存块的对应单位称为 Cache 块(Block)
- Cache 块大小与主存块大小相等
映射关系
主存地址划分:

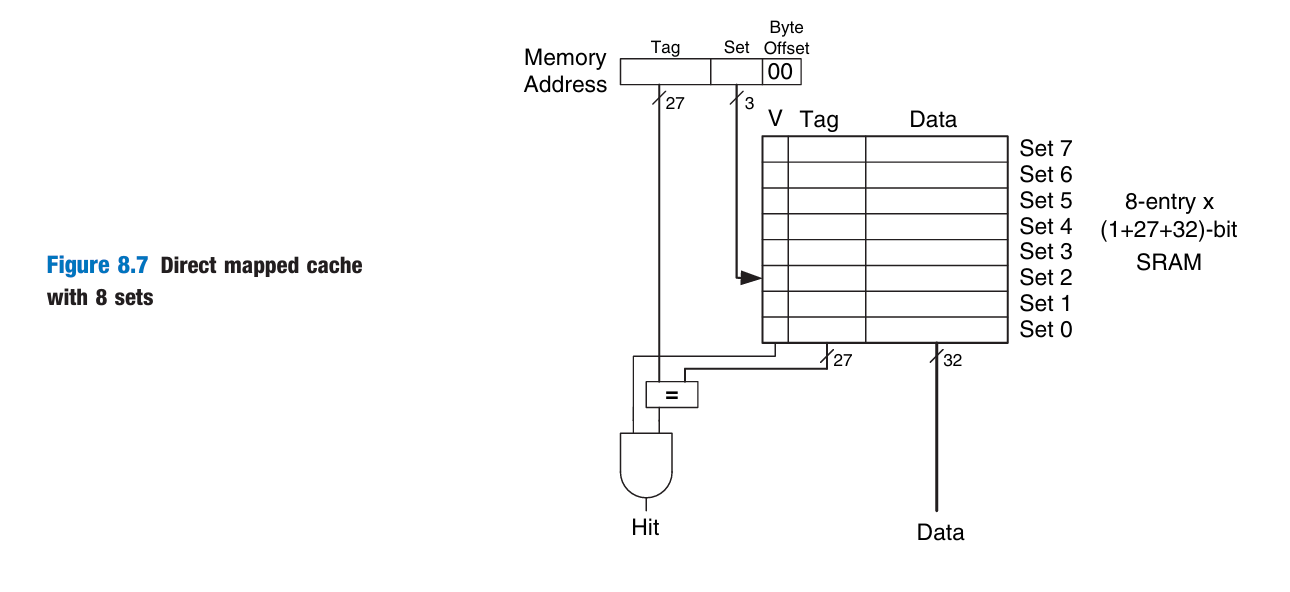
块大小为一个字时
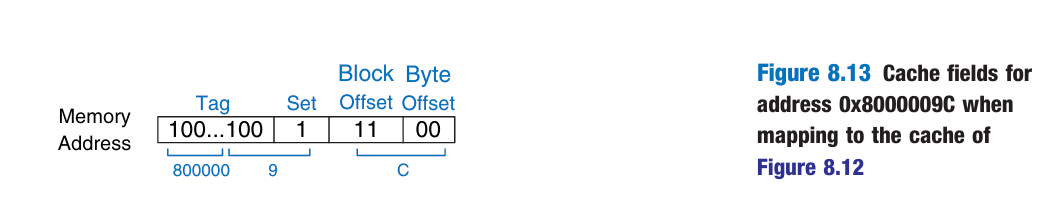
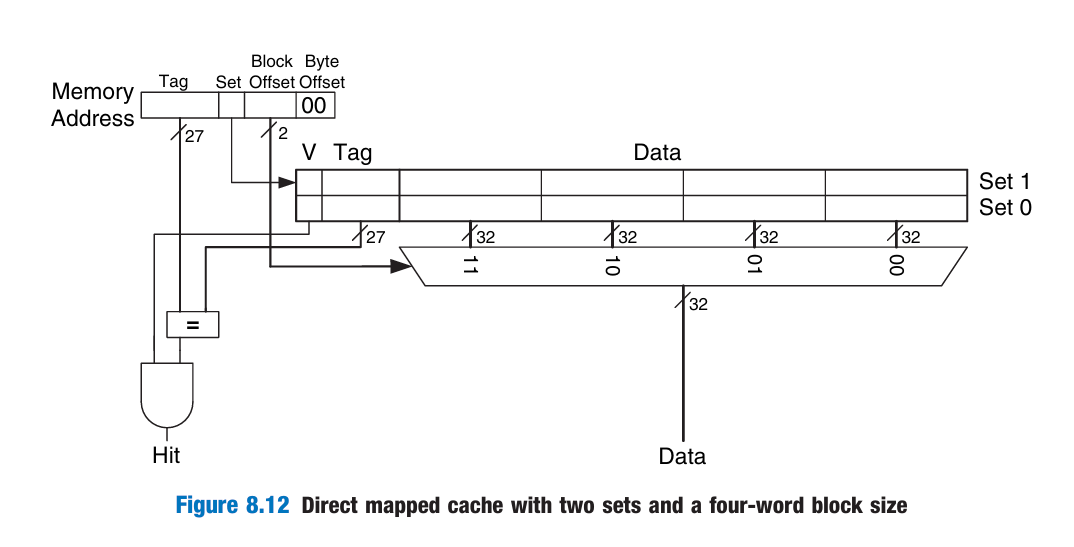
块大小大于一个字时
位数分别为:
- Offset:
- Byte Offset:
- Block Offset:块内偏移字数:
- Set:
- Tag: 剩余位数
访问逻辑:
- 用 Set 找 Cache 行
- 用 Tag 判断是不是要的主存块
- 用 Valid Bit 判断是否有效
- 用 Offset 找块内字、字节
映射方式
Note
以下以每块 1 字为例讲解。
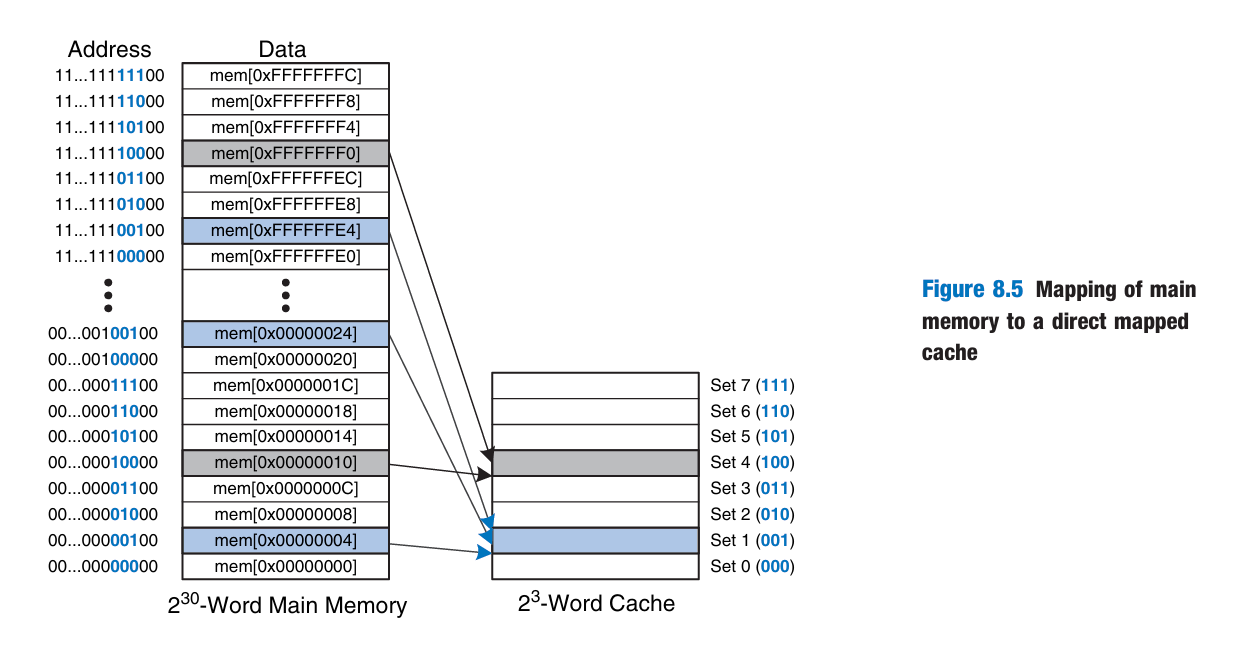
直接映射
每一组只包含一块,,因此每一个主存地址都映射到 Cache 的同一组:,K 为地址为 Addr 的内存块映射的 Cache 组序号。
因此会有很多主存块被映射至同一个 Cache 块(同一个 Set)。
优缺点
- 优点:实现简单,只需利用主存地址中的区地址,与块地址对应的Cache块中Tag 进行1次比较,即可确定是否命中。
- 缺点:映射关系不灵活。
- 因每个主存块只能固定地对应某个确定的Cache块,会出现Cache有很多空闲,但新块不能直接写入而需要替换的现象,Cache空间的利用不充分。
- 由于一组里只有一个缓存块,因此两个映射到同一组的地址常常会冲突,损失率高。
多路组相联
N 路组相联 Cache,通过为一组提供 N 块缓存块的方式减少冲突。每个内存地址仍然映射到唯一的一组,但是可以映射到一组 N 块中的任意一块。
全相联
全相联 Cache 只有一组,其中包含 B 路,即 。存储器地址可以映射到任何一块。因此全相联 Cache 可以成为 B 路组相联 Cache。
在相同容量下,全相联 Cache 有最小的冲突损失,但是要更多的硬件比较 Tag。

总结
缺失处理
CPU访问Cache缺失时,CPU必须等待数据装入Cache后才能访问Cache,这期间的时间损失称为缺失损失。块的增大会导致缺失损失的增大。
其中,取出块的时间为第一个字的延迟时间(存储器访问)+ 块的剩余部分的传送时间。
存储组织
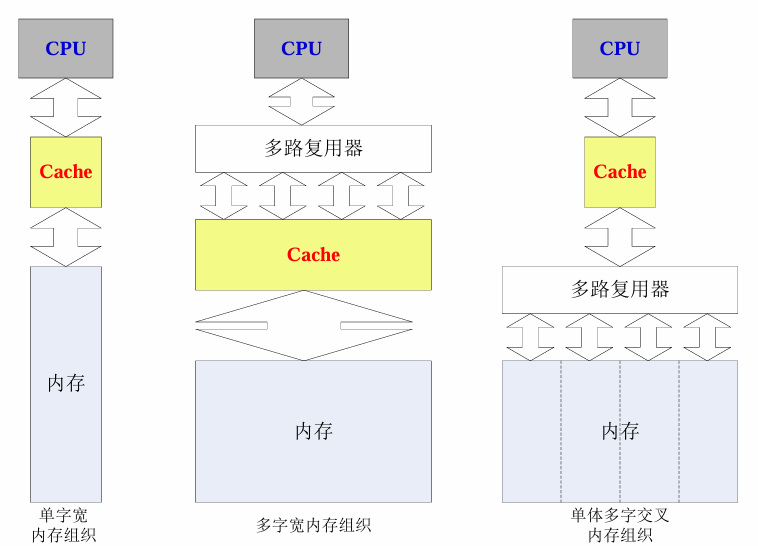
Cache的存储组织对缺失损失具有很大的影响
- 单字宽内存组织:CPU 一次请求 1 个字,Cache 一次也只和内存交换 1 个字,内存本身也是 单字宽。
- 多字宽内存组织:CPU 仍然是逐字访问,内存是多字宽的,一次可以返回 多个字。Cache miss 代价减小。
- 单体多字交叉内存组织:内存被分成 多个内存体(bank),不同地址映射到不同 bank,可以并行访问多个 bank。内存吞吐提升。
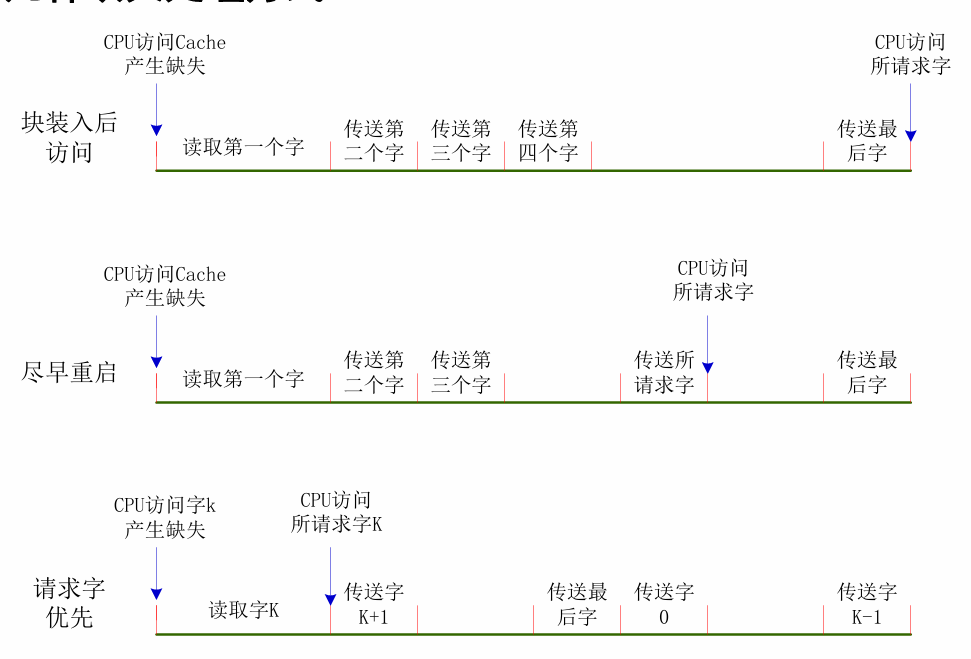
缺失处理方式
- 块装入后访问:缺失数据块中各字按顺序全部装入Cache后,再从Cache中访问所请求的字(也即引起缺失的字)
- 尽早重启(early restart):缺失数据块中各字按顺序装入 Cache,一旦所请求的字装入Cache,CPU立即访问该字,控制机构再继续传送剩余数据到cache
- 请求字优先(requested word first):所请求的字先装入 Cache,CPU立即访问该字,控制机构再按照先从所请求字的下一个地址、再到块的起始地址的顺序继续传送剩余数据到 cache
数据替换
替换策略
- 最近最少使用法(IRU)
- 被调入或被替换的块,其计数器清0,而其它的计数器则加1
- 访问命中时,所有块的计数值与命中块的计数值进行比较
- 如果计数值小于命中块的计数值,则该块的计数值加1
- 如果块的计数值大于命中块的计数值,则数值不变
- 最后将命中块的计数器清为0
- 需要替换时,则选择计数值最大的块来替换
- 先进先出法(FIFO)
- 当某块被装入或被替换时,该块的计数器清为0,而同组的其它各块的计数器均加1
- 当需要替换时就选择计数值最大的块被替换掉
- 最小使用频率法(IFU)
- 随机法(RAND)
数据一致性
数据一致性的问题主要由写操作产生,有两种策略:
- 写直达(Write Through):写 Cache 的同时写主存,效率较低
- 写回(Write Back):写操作只更新 Cache 中的数据,直到 Block 替换时才将整个 Block 写回主存,一般使用“脏位”(Dirty Bit)来表示 Block 在替换回主存之前是否被修改过
虚拟存储系统
背景
面临问题
- 同时运行的程序对内存的需求之和可能超过计算机实际内存容量
- 单个程序对内存的需求也有可能超过机器实际内容容量
- 存储器保护:
- 编写编译程序时,不知道程序运行时将和哪些其他程序共享内存
- 编程者实际上希望把每个程序编译在他自己的地址空间中
解决方法
程序运行时,内存管理采用交换机制(硬件和操作系统实现),进程保存在外存中,进程执行时,只将其活跃部分调入内存(局部性原理)。此时内存可以视为辅存的“高速缓存” 。
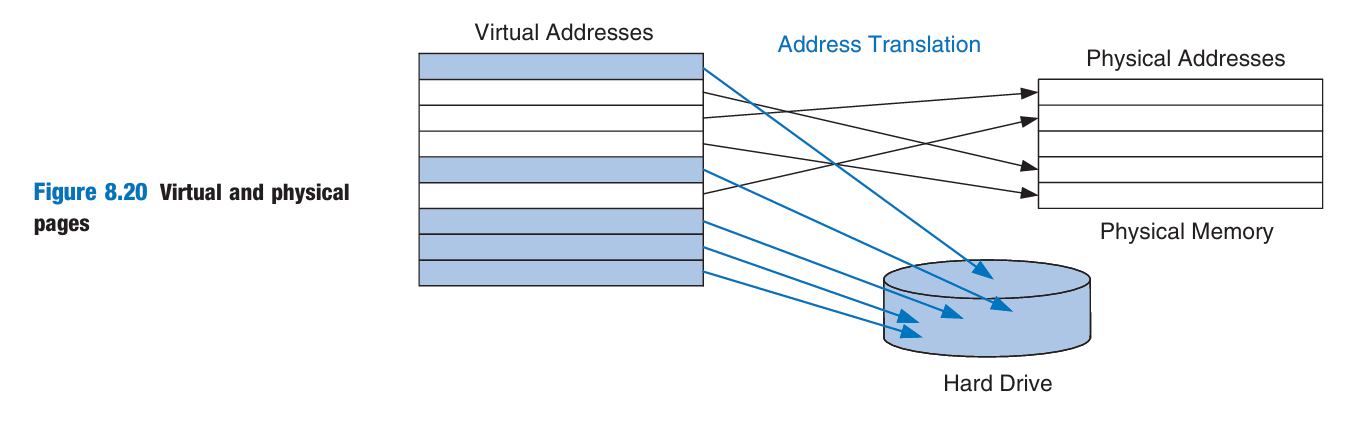
这样一种把内存当做辅助存储器的高速缓存的技术,称为虚拟存储器技术。
外存
虚拟存储器的硬件基础。
容量大且价格便宜、非易失,但访问速度显著慢于主存,因此用以提供虚拟化存储系统使用的容量。
不与 CPU 直接交换信息,通过需通过 I/O 机制将数据调入物理存储器,即主存,来访问(主存内保存其中一部分内容,类似于 Cache 之于主存)。
典型代表:
- 磁表面存储器:HDD、软盘
- 光介质存储器:光盘
- 半导体存储器:SSD、U 盘
磁硬盘基本结构
-
数据组织形式:
- 盘面
- 磁道
- 扇区
每个磁道包含的扇区数相同;
最小访问单位是扇区。 -
性能指标:
- 记录密度
- 道密度:磁盘沿半径方向单位长度的磁道数
- 位密度:单位长度磁道记录二进制的位数
- 存储容量:盘面数(磁头数) * 每盘面的磁道数 * 每磁道的扇区数 * 扇区容量
- 访问时间(也称寻址时间):
- 寻道时间 :磁头从当前位置定位到目标磁道所需时间(平均值)
- 寻区时间 : 磁头定位到目标磁道后,等待目标扇区旋转到磁头下所需的时间(平均值), 一般是转半圈的用时。
- 数据传输率 :单位时间内传输的数据位数(bit/s)
- 记录密度
基本概念
- 空间:
- 用户编程空间:程序可以访问虚拟存储器中任意地方,其地址称为虚地址,对应虚存空间。
- 物理内存空间:主存的空间,计算机物理内存的访问地址称为实地址,其对应的存储空间称为物理空间或主存空间。
flowchart TD A[程序访问虚拟地址空间] -->|虚拟地址| B[MMU + OS 映射] B --> C[物理内存(DRAM)] B --> D[外存(Swap / 扩展存储)] style A fill:#f9f,stroke:#333,stroke-width:1px style B fill:#ff9,stroke:#333,stroke-width:1px style C fill:#9f9,stroke:#333,stroke-width:1px style D fill:#9cf,stroke:#333,stroke-width:1px
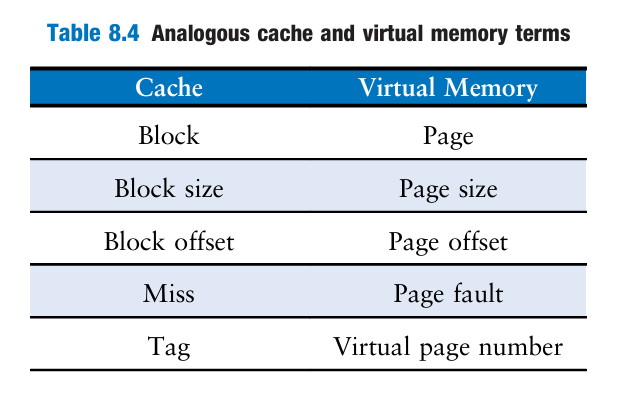
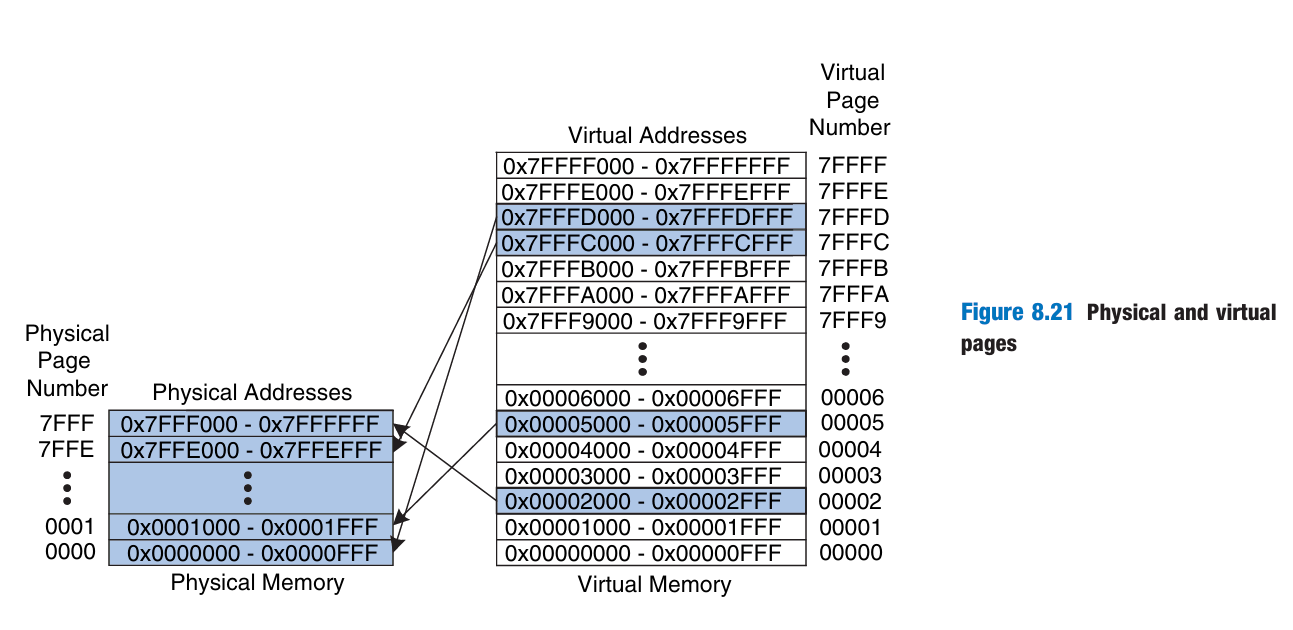
- 页:虚拟存储器分为虚页,物理存储器分为物理页。虚页可以映射到任意实页,类似于全相联 Cache。
- 地址格式:
- 虚地址:虚页号 + 页内地址
- 实地址:实页号 + 页内地址
- 页表:记录虚页与实页的映射关系,实现虚实地址的转换。页表建立在内存中,操作系统为每道程序建立一个页表。页表用虚页号作为索引,页表项包括虚页对应的实页号和有效位。因此页表有虚页个数行,每行为实页号位数 + 1 有效位。
- 页表寄存器:保存页表在内存中的首地址
这些概念与 Cache 有相似之处:
工作原理
- 虚拟地址空间
- 程序看到的连续地址空间,即虚拟存储器(虚存)。
- 不关心数据到底在主存还是外存。
- 外存映射
- 操作系统把外存(swap / 扩展存储)划分成页(page),每页大小通常和虚拟页大小一致。
- 虚拟页可以映射到外存中的任意页,形成一个逻辑连续的虚拟空间。
- 虚地址通过页表映射到实地址,因此每次访存,需要访问两次物理存储器:一次访问页表,一次访问数据。
- 主存缓存
- 为了加速访问,OS 会把活跃的虚拟页加载到主存(DRAM)中。
- 主存中的页面就是 物理页,对应 CPU 可以直接访问的物理地址。
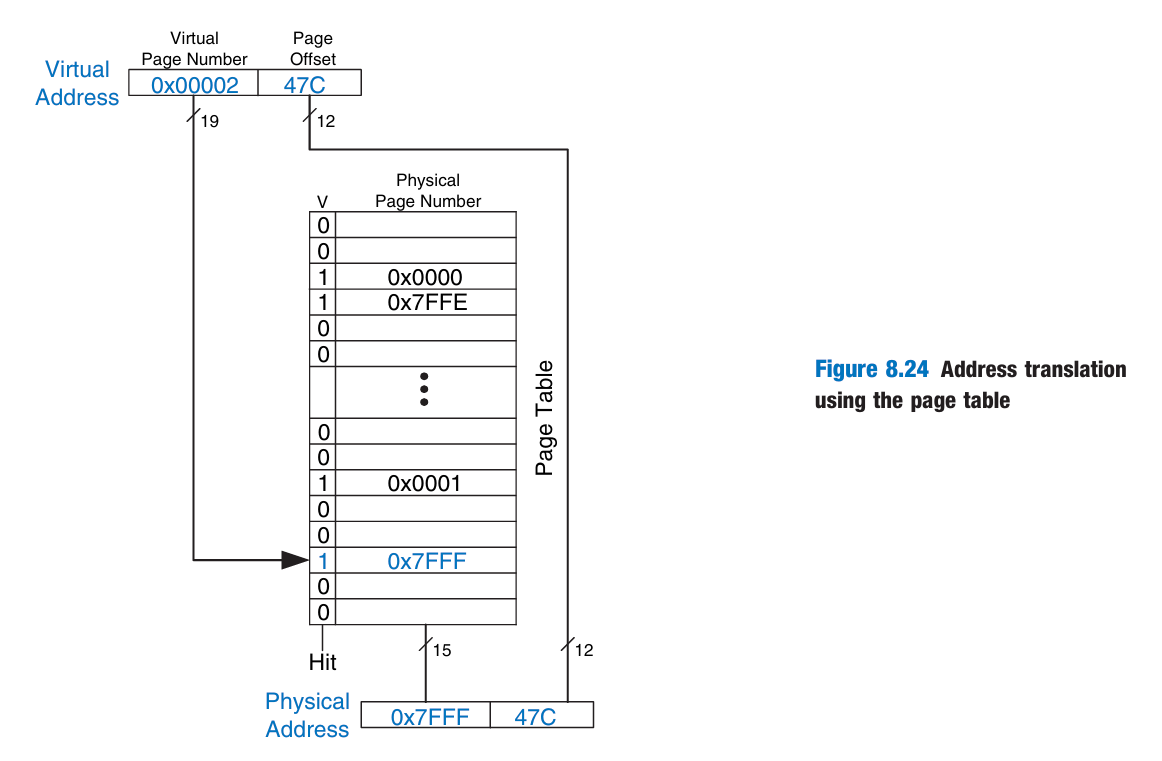
地址转换
- 页地址格式:页号 + 页偏移量
- ,说明页内字节位置。
- ,同时也是总页数。
通过页表建立虚地址的页号和实地址的页号之间的映射关系。
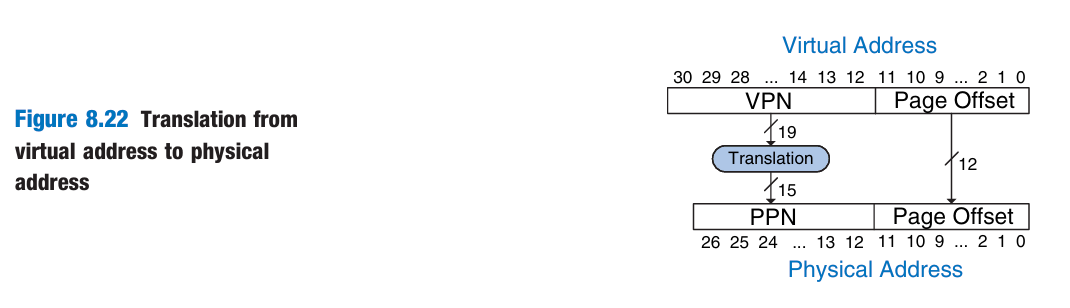
因此虚地址和实地址的最低的 Page Offset 位是一样的,从虚地址到实地址只需要转化页号。
页表
如前所述:
记录虚页与实页的映射关系,实现虚实地址的转换。页表建立在内存中,操作系统为每道程序建立一个页表。页表用虚页号作为索引,页表项包括虚页对应的实页号和有效位。因此页表有虚页个数行,每行为实页号位数 + 1 有效位。
因此页表为一个连续数组,以虚地址为索引,每一项记录了虚拟页是否在内存、在内存的实地址。
页表在内存的位置是任意的,由 OS 决定,使用页表寄存器保存页表在内存中的基地址。
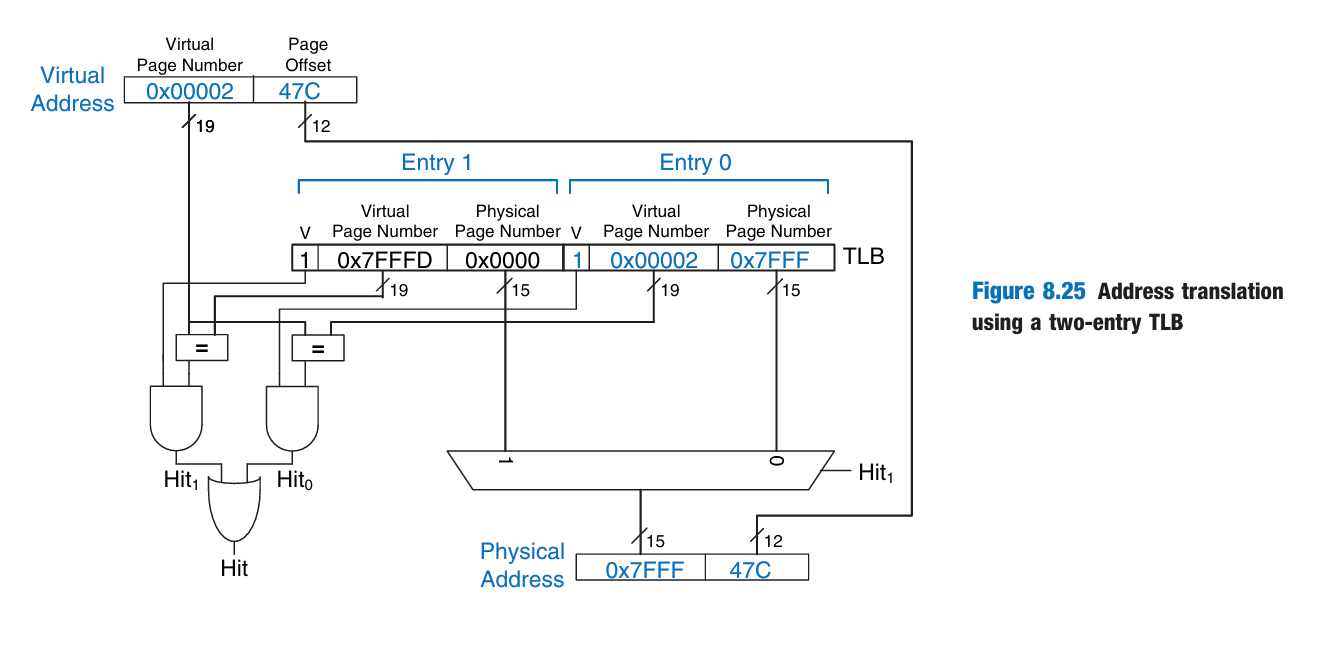
转换后备缓冲器(TLB)
如果每一次访存都需要页表,那么虚拟存储器性能会受到严重影响。因此考虑到页表访问的局部性,如果处理器可以记住最后读出的页表表项,很可能可以重用映射而不需要重复访问页表。
因此处理器可以把最近使用的页表表项保存在名为 转换后备缓冲器(快表,TLB) 的小型高速缓存中。
处理器在访问页表前,先在 TLB 查找表项。如果命中则返回相应实页页号,否则从页表中获取映射关系。
TLB 一般使用全相联模式,每一项保存虚页页号、对应的实页页号、有效位、修改位