基本操作
图像
数据读取:
import cv2 # opencv 的读取顺序是BGR
import numpy as np
img = cv2.imread("cat.jpg") # 结果为numpy的ndarray图像展示:
cv2.imshow("image", img)
cv2.waitKey(0)
cv2.destroyAllWindows() 靠
靠 numpy 的栈结构展示所有图片
图像保存:
cv2.imwrite("my_cat.png", img)图像属性:
img.shape # (H, W, C) C 为通道数
img.size # 像素点个数(H * W)大小调整
img1 = cv2.resize(img, (W, H))
img2 = cv2.resize(img, (0, 0), fx= , fy= ) # 宽高缩放倍数
cv.imread() 参数:
cv2.IMREAD_COLORcv2.IMREAD_GRAYSCALE(灰度图)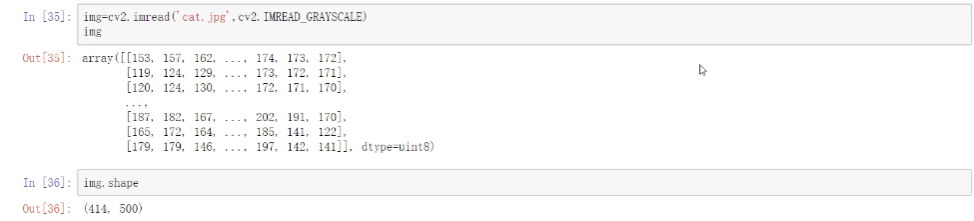
视频
打开视频
vc = cv2.VideoCapture("test.mp4") # 可以捕获摄像头,也可以输入路径读取视频
if vc.isOpened():
open, frame = vc.read() # 按帧读取,返回成功与否、本帧图像
else:
open = False
while open:
ret, frame = vc.read()
if frame is None:
break
if ret == True:
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 每一帧转化为灰度图
cv2.imshow("result", gray)
if cv2.waitKey(100) & 0xFF == 27: # 按 esc 退出
break
vc.release()
cv2.destoryAllWindows()ROI 区域(截取部分图像数据)
img = cv2.imread("mycat.png")
cat = img[0:200, 0:200]
cv2.imshow("cat", cat)读入数据本身是个 ndarray,可以和数组一样操纵、切片
颜色通道提取与合并
b, g, r = cv2.split(img)
# or
b, g, r = img[:, :, 0], img[:, :, 1], img[:, :, 2]
img = cv2.merge(b, g, r)
cur_img = img.copy()
cur_img[:, :, 1] = 0
cur_img[:, :, 2] = 0
# 仅保留 B ,蓝色图边界填充
top_size, bottom_size, left_size, right_size = (50, 50, 50, 50)
replicate = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REPLICATE)
reflect = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT)
reflect101 = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT_101)
wrap = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_WRAP)
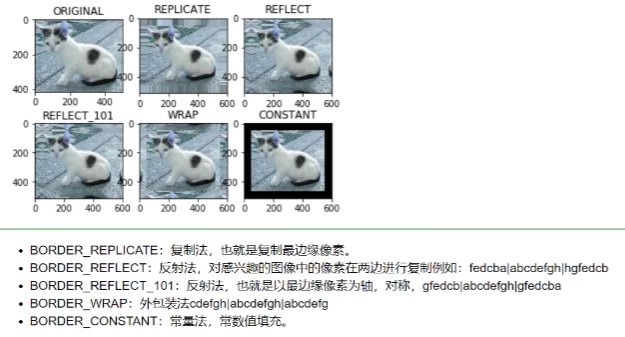
constant = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_CONSTANT, value=0)仅最后的 type 不同,区别如下:
数值计算
img_cat = cv2.imread("cat.jpg")
img_dog = cv2.imread("dog.jpg")
img_cat = img_cat + 10 # 在每个像素点上都 + 10
img1 = img_cat + img_dog # 必须尺寸一样,使得对应像素相加,自动模256
img2 = cv2.add(img_cat, img_dog) # 如果相加大于255,取255图像融合
res = cv2.addWeighted(img_cat, 0.4, img_dog, 0.6, 0) # 加权,末了为偏置项